Сразу после изобретения СЗМ, появились новые методы и применения, основанные на этой технологии, позволяющие исследовать свойства веществ на наноразмерном уровне. Один из таких методов – пьезо-силовая микроскопия (ПСМ), которая дает уникальную информацию об электромеханических свойствах сегнетоэлектриков.
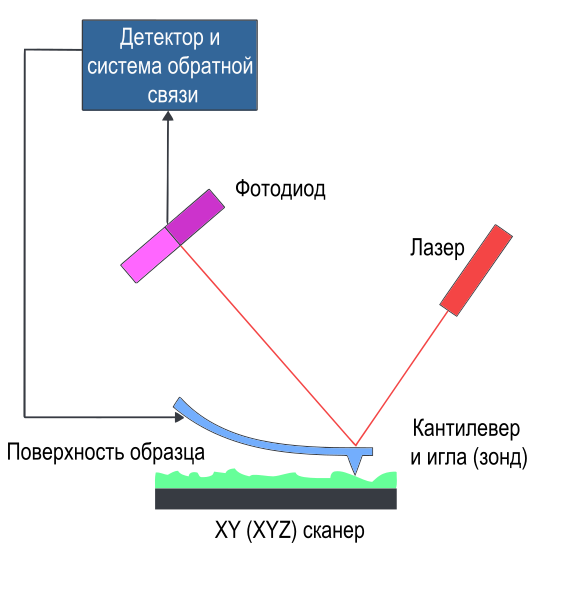
В методе ПСМ используется проводящий кантилевер, который контактирует с поверхностью изучаемого сегнетоэлектрического или пьезоэлектрического материала. Прикладывается предустановленное напряжение между поверхностью образца и кантилевером АСМ, образуя внешнее электрическое поле внутри образца.
Из-за пьезоэлектрического эффекта, а также электрострикции сегнетоэлектрических и пьезоэлектрических материалов, поверхность образца будет локально расширяться или сокращаться в соответствии с приложенным полем. Например, если вектор поляризации электрического домена в измеряемом образце направлен по нормали относительно поверхности и параллелен вектору напряженности электрического поля, то данный домен будет испытывать вертикальное расширение. Так как кантилевер находится в контакте с поверхностью образца, такое расширение приведет к тому, что кантилевер изогнется вверх и, в результате, изгиб кантилевера оказывается больше, чем в случае если бы не было приложенного электрического поля. (Рисунок 1)
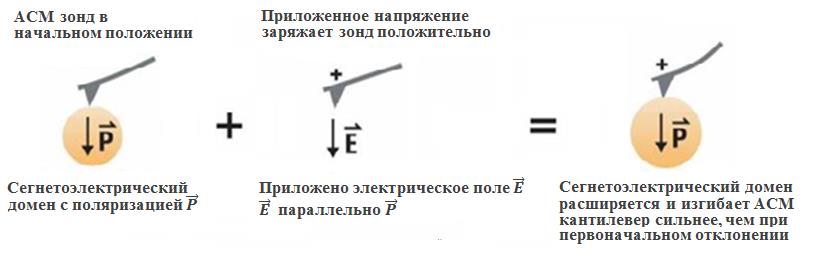
Рисунок 1. Пьезо-силовая микроскопия. Вектор напряженности электрического поля параллелен поляризации.
В другом случае, когда вектор поляризации антипараллелен приложенном электрическому полю, домен будет уменьшаться, что приведет к меньшему изгибу кантилевера. (Рисунок 2) Величина отклонения кантилевера, в таком случае, напрямую зависит от величины расширения или сжатия электрических доменов образца, а также пропорциональна приложенному электрическому полю.
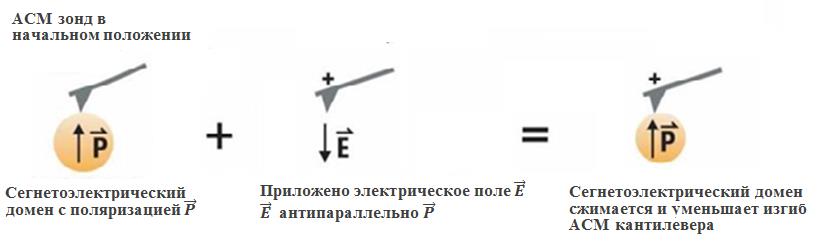
Рисунок 2. Пьезо-силовая микроскопия. Вектор напряженности электрического поля антипараллелен поляризации.
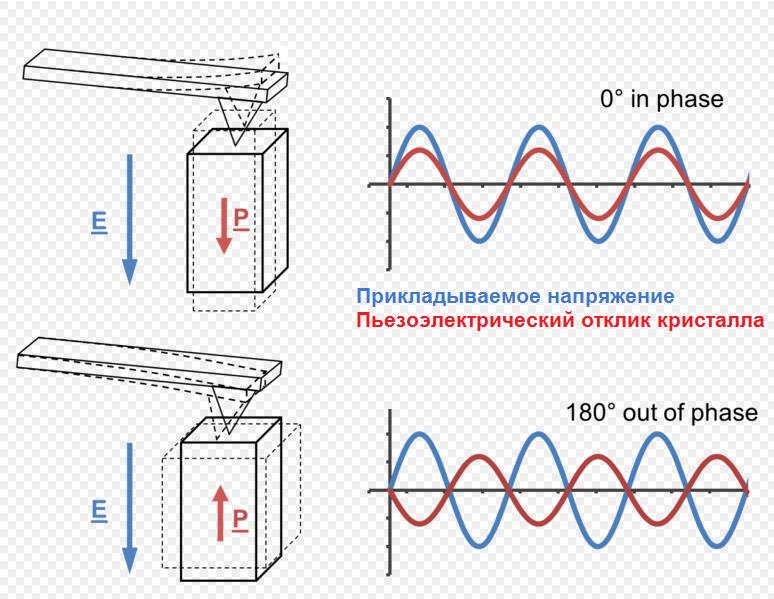
Если приложенное напряжение содержит переменную компоненту, обратный пьезоэлектрический отклик от образца выразится в осцилляции поверхности на такой же частоте приложенного переменного напряжения. В случае если образец является идеальным пьезоэлектрическим кристаллом, его поляризация может быть выражена через механическое напряжение в следующем виде:
Pi=dijkσjk,
где dijk-тензор пьезоэлектрических модулей 3 ранга, σjk - тензор напряжений, Pi - поляризация. Для материалов с тетрагональной сингонией, тензор пьезоэлектрических модулей может быть записан в виде:
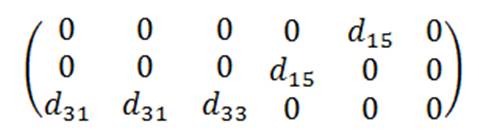
В этом случае, прикладывая переменное напряжение V=V0cos(ωt), вибрации поверхности образца будут иметь вид ΔZ = ΔZ0cos(ωt + φ), где амплитуда вибрации ΔZ0=d33V0. Фаза φ=0°,если вектор поляризации параллелен приложенному электрическому полю, фаза φ=180°, если вектор поляризации антипараллелен приложенному электрическому полю. Такая осцилляция будет прямо отражаться в амплитудном и фазовом сигнале АСМ зонда, и может быть прочитана, используя усилитель синхронного детектора. (Рисунок 3)
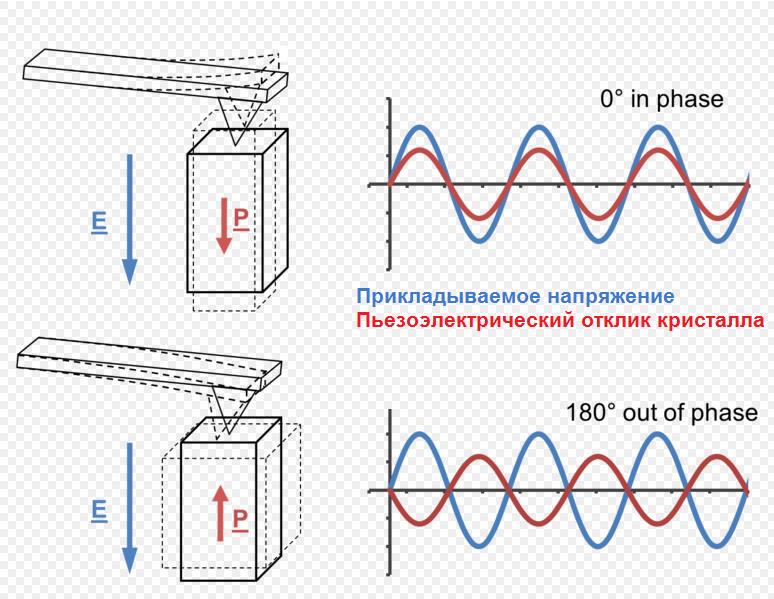
Рисунок 3. Пьезо-силовая микроскопия. Вклад переменного поля.
Обычном в ПСМ, приложенное переменное напряжение должно быть намного меньше, чем коэрцитивное напряжение, необходимое для переключения поляризации в домене.


 в
в